
このページでは
タコジェネレータについて
説明します。
個人的にはタコジェネレータは
最近の機械では見ることは
少なくなりましたね。
1.タコジェネレータとは、用途
タコジェネレータとは、
簡単にいうとモーターの回転速度を
検出するものです。
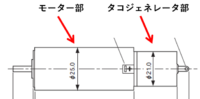
上図のように
DCモーターにつけて
そこから回転速度を検出します。
(DCモーターやタコジェネレータの
メーカーであるシチズン千葉精密
株式会社のHPより抜粋しました)
回路図では下図のように書かれます。
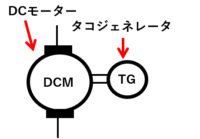
タコジェネレータはTGと書かれ
DCモーターとセットで書かれることが
多いです。
原理については後述しますが
用途は、モーターを設定した速度で
回転させる目的で使います。
モーターの速度を設定しても
負荷の変動などでその速度を
保つことはできません。
一定に保つためには、
現在の速度を測定して、それを元に
設定した速度になるように
モーターへの入力を変更する必要が
あります。
例えるなら、車の運転で40km/hに
なるようにアクセルを踏んでいても
足が動いてずっと、踏み続けられないなど、
色々な理由で多少はズレると思います。
その時スピードメーターを見ながら
40km/hになるようにアクセルを
調整します。
タコジェネレータは、ここでいう
スピードメーターの役目に
なります。
スピードメーターが無ければ
速度を補正しようにも
どれだけ補正していいか
わかりません。
全体像は以下の図のように
なります。
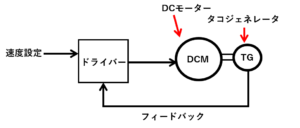
モーターの回転速度を
タコジェネレータで測定し
それをドライバー(電子機器)を
フィードバックして
設定速度との差分を補正する分だけ
電圧を変えて
モーターへ出力します。
モーター(三相誘導電動機)の回転速度を
可変する電子機器として
インバータがあります。
三相誘導電動機の全体概要や基礎知識は
以下のページを参考ください。

インバータの全体概要や基礎知識は
以下のページを参考ください。
このインバータは回転速度は可変
できますが、実際の速度を検出・
フィードバック・補正はしません。
ですので、非常に便利なインバータですが
高精度に速度設定をする用途では
使いにくい機器にはなります。
精密なモーターの回転速度が
必要な機械については私の周辺では
工作機械があります。
主軸や送りの回転数が変動すると
精密に削ることができなくなるので
速度をフィードバックして
設定速度を保った状態で削ります。
2.タコジェネレータの原理
タコジェネレータの原理は
直流発電機と同じです。
回転速度を検出したいモーターに
取付て、モーターの軸の回転力で
タコジェネレータの回転子を
回転させ、電気を発生させます。
モーターの回転数に比例した
電気(直流電圧)が発生します。
逆回転ならマイナスの直流電圧が
発生します。
その電圧をドライバーに入力して
フィードバックするのです。
FB電圧が設定より高ければ、
設定より低ければ、ドライバーからの
出力をこうする
といった感じにします。
直流発電機が分かりにくい方も
いるかと思います。
そういった方は
以下のページを参考ください。
このページは直流電動機の
回転原理について解説した内容ですが
参考にはなると思います。
直流電動機は電気で回転子を
回転させる、
直流発電機は回転させて電気を
発生させる、
基本、この違いだからです。
3.使い方
ここまでの内容から分かるかと
思いますが、
タコジェネレータは単体だけでは
役に立ちません。
モーターを高精度で回転させるための
システムの中の1つの部品です。
ドライバーやモーターなどが
必要です。
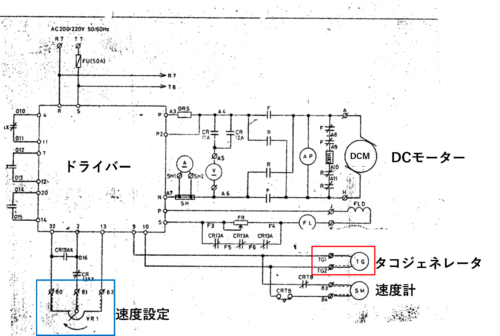
上図はある機械の電気回路図内で
タコジェネレータが書かれた部分を
抜き取ったものです。
赤枠のタコジェネレータをドライバーに
接続して回転速度をフィードバック
しています。
青枠のように速度設定もありますね。
そして、DCモーターへ電圧を印可して
います。
見てわかりますが、ドライバー中心で
動いています。
タコジェネレータをどう使うかなど
ドライバーのマニュアルに記載して
あるので それを見て使っていきます。
このドライバーにもマニュアルが
ありタコジェネレータを接続する
端子についても記述はありました。
4.最後に
タコジェネレータは昔の機械では
使われているのを見ますが、
最近の機械では見ることはなくなりました。
直流モーターではなく
交流モーター(サーボモーター)を
使うことが多くなったからです。
交流モーターの速度検出は
タコジェネレータではなく
エンコーダーが一般的に
使われます。
50年以上ぐらい前はモーターの
速度変更は、電圧を変えることで
可能な直流モーターが主流でした。
しかし、インバータの発展に伴い
使いやすい交流モーターを
使うことが一般的になりました。
タコジェネレータを使った
工作機械のドライバーが故障したときに、
メーカーに問い合わせました際、
ドライバーは生産してなく
修理はできないとのことでした。
代替案は、モーターを
交流モーターに変え、
速度制御には
エンコーダーやサーボアンプを使う
現在の工作機械でよく見る方法への
改造でした。
このように、現代では
置き換わってきてはいますが
修理に携わる方は、昔の機械も
修理することがあるもあるでしょうから
その役目ぐらいは知っておいた方が
いいでしょう。
本文中でも書きましたが
モーターの回転数を可変する電子機器と
してインバータもあります。
フィードバックが必要である
高精度な位置決めが必要ない時は
サーボよりもインバータを
通常は使います。
(安価で設置も楽です)
当方では、そのインバーターについて
初心者向けの
入門教材を販売しています。
実習用キット付で実機を使って
インバータの基本を習得できます。
以下の画像をクリックして
紹介ページをご確認ください。

初心者のための講座へ-以下をクリック!












コメントを残す